Швейцарські інженери створили рукавичку, яка дозволяє людям відчувати фізичний контакт у віртуальній реальності завдяки електростатичним гальмам на згинах пальців і п'єзоелектричним актуаторам на їх кінцях. Експерименти показали, що рукавичка покращує точність маніпуляції предметами у віртуальній реальності, розповідають автори статті, представленої на конференції UIST 2018 в Берліні, інформує Ukr.Media.
Шоломи віртуальної реальності вже досягли досить високого рівня розвитку і інженери продовжують удосконалювати їх. Приміром, в останній рік відразу декілька виробників, в тому числі HTC і Oculus, представили автономні VR-шоломи, які виробляють всю обробку даних за допомогою вбудованого чіпа. Тим не менш, незважаючи на досить високий рівень графіки, поки всі серійні пристрої віртуальної реальності мають недолік - вони не можуть якісно імітувати фізичний контакт людини з віртуальними об'єктами.
Виробники серійних VR-шоломів намагаються компенсувати відсутність реального фізичного контакту вібрацією в контролерах, але вона лише віддалено нагадує реальний контакт. Разом з цим існує безліч дослідницьких проектів, які використовують більш складні принципи і конструкції для більшого реалізму. Найчастіше інженери створюють VR-рукавички, які дозволяють передавати навіть жорсткість віртуальних предметів, але майже завжди вони мають масивний і незручний в носінні актуаторний механізм.
Група інженерів з Федеральної політехнічної школи Лозанни і Швейцарської вищої технічної школи Цюріха під керівництвом Отмара Хіллігеса (Otmar Hilliges) створили більш компактну рукавичку для імітації фізичного контакту у віртуальній реальності.
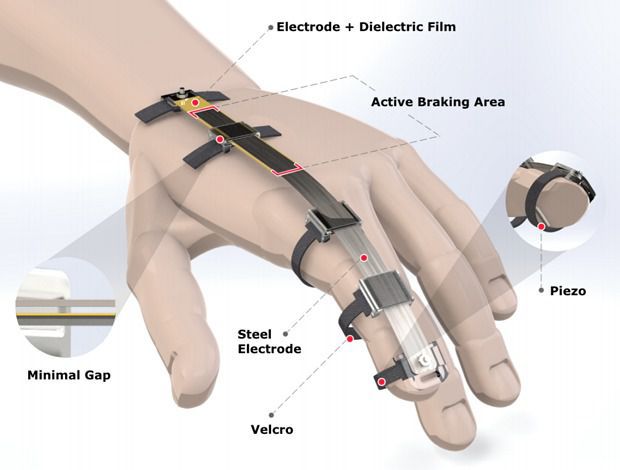
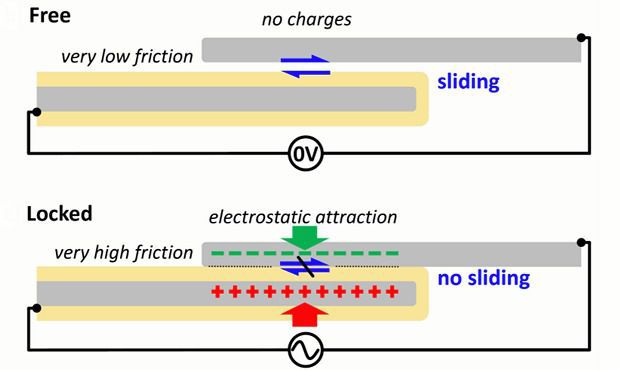
В якості основи пристрою годиться звичайна рукавичка. На її великий і вказівний пальці з допомогою липучок закріплюються два електростатичних гальма. Вони являють собою дві металеві смужки, одна з яких покрита тонким шаром діелектрика. Принцип роботи гальма полягає в тому, що в звичайному стані смужки вільно ковзають одна відносно одної, але при додатку напруги протилежні заряди на двох пластинах викликають електростатичне тяжіння. Інженери показали, що одне таке гальмо може в активованому стані утримувати вантаж вагою два кілограми.
Гальма дозволяють створювати опір руху руки і створювати відчуття, ніби користувач стискає предмет з певною жорсткістю. Крім того, для реалістичності інженери додали в липучки на кінцях пальців п'єзоелектричні актуатори, які на невеликий час активуються під час контакту з віртуальним об'єктом і імітують дотик до нього. Також інженери закріпили на рукавичці візуальні маркери, які дозволяють системі захоплення рухів зіставляти рухи руки і положення віртуальних об'єктів.
Інженери перевірили пристрій на добровольцях, яких просили виконати дії декількох типів, в тому числі переміщення віртуального циліндра через вигин трубу і кидання літаючого диска. Результати експерименту показали, що застосування рукавички дозволяє підвищити точність виконання цих завдань.




















