
Японські інженери навчили робоманіпулятора відстежувати стан об'єктів і швидко підлаштовувати свої рухи під рухи людини для синхронізації дій. Короткий опис розробки опубліковано на сайті Токійського університету, інформує UkrMedia.
Взаємодія між людиною і роботом (Human-robot interaction, HRI) - це одне з найважливіших напрямків сучасної робототехніки. В рамках нього інженери розробляють роботів, призначених для допомоги людині і спільної роботи з ними, а також пропонують різноманітні концепції і досліджують психологічні або соціальні аспекти такої взаємодії. Зокрема, поки роботи не знаходяться на досить високому рівні розвитку, інженери створюють роботів-помічників, які можуть, наприклад, подавати інструменти, тримати вантажі або виконувати інші допоміжні роботи. Тим не менше, навіть такі роботи найчастіше не можуть зрівнятися з людиною по швидкості роботи, а значить, не підходять для реального застосування поза лабораторій.
Група інженерів з лабораторії Масатоші Ішікави (Masatoshi Ishikawa) Токійського університету створила роботизований маніпулятор, здатний відстежувати рухи людини і адаптувати власні із затримкою в одну мілісекунду.
Маніпулятор складається з трьох пальців, закріплених на єдиній основі. Маніпулятор працює в парі з високоточною системою відстежування рухів, що складається з інфрачервоного випромінювача, що висвітлює предмет у руці, а також високошвидкісної камери. Для відслідковування рухів інженери вибрали поширений метод - на краю предмета закріплюються світловідбиваючі маркери, положення яких в реальному часі визначається камерою.
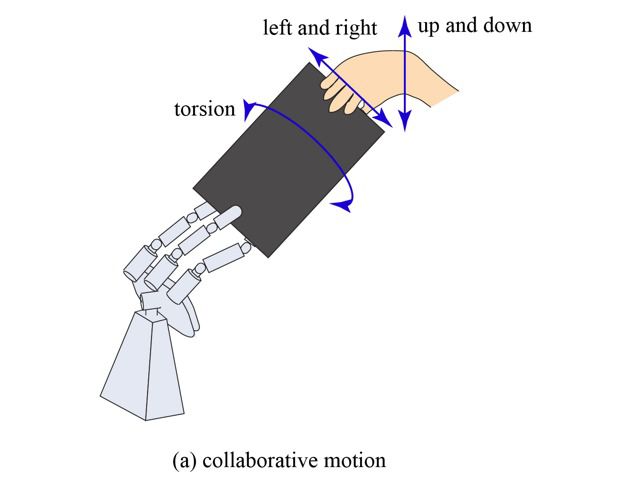
Завдяки такій системі робот вміє в реальному часі підлаштовувати положення своїх пальців при обертанні пластини людиною навколо двох осей, а також компенсувати стан пластини таким чином, щоб вона завжди була паралельна підлозі. В якості демонстрації можливостей системи інженери показали, як людина разом з роботом можуть насадити пластину з отвором діаметром 6,35 міліметрів на металевий штир діаметром 6,325 міліметрів, залишаючи пластину у горизонтальному положенні.
Розробники не розповіли про те, якими вони бачать потенційні застосування розробки. Можливо, таку систему можна застосувати у важких моторизованих верстатах, які могли б постійно відслідковувати напрям зусилля користувача і рухатися у відповідності з ним.
Нещодавно інженери з лабораторії Масатоші Ішікави представили інше застосування для трьохпальцевого маніпулятора з високошвидкісною системою відслідковування рухів. Вони навчили його збирати кубик Рубік, виконуючи рухи трьох типів і відстежуючи положення центру мас кубика з частотою 500 разів на секунду. Крім того, трохи пізніше вони показали іншого спритного і швидкого робота, який вміє ловити падаючі предмети, не пошкоджуючи їх. В якості прикладу інженери продемонстрували, що робот здатний зловити падаючий на нього шматочок маршмеллоу, практично не мнучи його.




















