Швейцарські, німецькі і американські інженери навчили робота ANYmal ходити, бігати і відновлюватися після падінь, використовуючи нейромережевий алгоритм, а не задані вручну алгоритми-контролери. Особливість роботи також полягає в тому, що спочатку алгоритм навчався під час симуляції, а потім вивчений навик вдалося перенести на реального робота, інформує Ukr.Media.
Інженери вже створили безліч ходячих роботів різних конструкцій, в тому числі досить досконалих. Наприклад, широко відомі роботи компанії Boston Dynamics, здатні утримуватися на ногах після ударів. Однак крім апаратної складової не менш важлива програмна. І тут поки існує явна проблема - зазвичай інженерам доводиться розробляти алгоритми-контролери самостійно, ґрунтуючись на поведінці реальних ходячих тварин або віртуальних моделей. Такий підхід забирає багато часу, а також не гарантує, що розробники знайдуть оптимальну ходу для наявної конструкції. Існують роботи, в яких інженери використовували нейромережу для управління і спочатку симулювали її поведінку у віртуальному світі, а потім переносили в реальний, але у них використовувалися роботи з простою конструкцією.
Група інженерів під керівництвом Марко Хюттера зі Швейцарської вищої технічної школи Цюріха використовувала аналогічний підхід, але застосувала його до більш складного за конструкцією робота ANYmal. Він має чотири ноги, що складаються з двох сегментів. Всього в роботі встановлено 12 електромоторів - по три на кожну ногу, два з яких скручують її, а один, встановлений на підставі, відхиляє всю ногу вбік відносно корпусу.
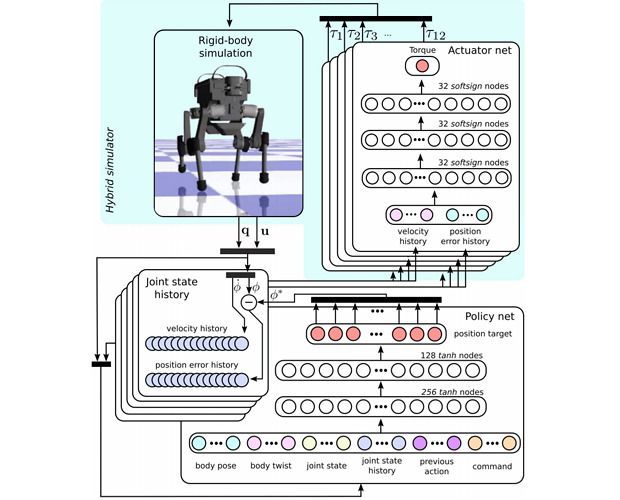
Дослідники застосували двоступеневий підхід, при якому одна нейромережа відповідає за планування рухів сегментів в цілому, а друга отримує ці рухи і підбирає конкретні значення зусилля для кожного електромотора. Обидві мережі мають структуру багатошарового перцептрона. Для їх навчання різним рухам автори використовували метод навчання з підкріпленням, при якому алгоритм отримує від віртуального середовища нагороду за виконувані дії і завдяки цьому поступово вчиться оптимальним діям. Після навчання у віртуальному середовищі навчені нейромережеві моделі завантажили в комп'ютер реального робота ANYmal.
Завдяки новим алгоритмам інженерам вдалося отримати три основних результати. По-перше, рухи робота стали більш стабільними і енергоефективними. По-друге, максимальна швидкість руху робота на 25% вища, ніж із застосуванням інших існуючих алгоритмів для нього. По-третє, робот навчився самостійно вставати на ноги з лежачого положення.
Хюттер і його колеги давно займаються експериментами з роботом ANYmal, причому не тільки його програмним забезпеченням. Приміром, нещодавно вони створили його модифікацію, на кінцях ніг якої закріплені колеса, що приводяться в рух електродвигунами. Завдяки цьому робот може перемикатися між різними режимами руху і проходити по складному рельєфу ефективніше, ніж аналогічні розробки.




















