Лабораторія DeepMind навчила систему штучного інтелекту слідувати текстовим навігаційним інструкціям, повідомляє The Next Web. Програмісти перевірили роботу алгоритму, відправивши його в подорож Нью-Йорком у віртуальному середовищі, створеному на основі Google Street View, інформує Ukr.Media.
Сучасні безпілотні автомобілі спираються на систему GPS-навігації, яка вбудована в бортовий комп’ютер. Якщо ж пасажир запропонує автомобілю доїхати до певного місця з допомогою списку інструкцій (наприклад, «рухайся прямо два кілометри і на першому перехресті поверни направо»), машина не впорається із завданням, незважаючи на її простоту. Справа в тому, що на відміну від людини, система ШІ не має накопиченого досвіду і не знає, як слідувати навігаційним інструкціям.

Щоб вирішити цю проблему, підрозділ Google DeepMind в минулому році перетворив карти Google Street View у навчальне середовище. З його допомогою дослідники навчили комп’ютер випливати з точки А в точку Б без використання маршруту або інших підказок. Однак стратегія алгоритму була незручною: він просто довго подорожував картою - до тих пір, поки не знаходив місце, яке зовні було ідентичне пункту призначення. У реальному житті такий підхід буде марний.
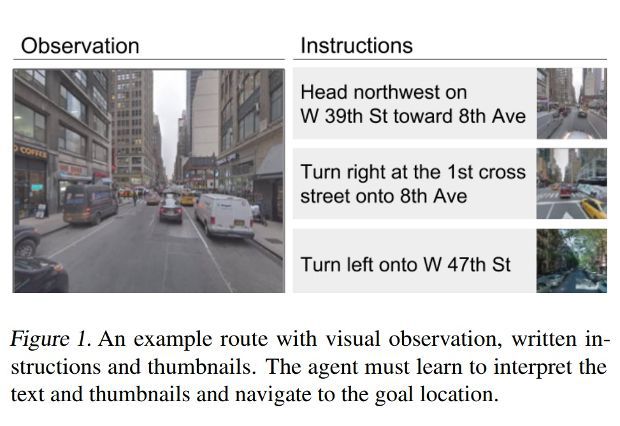
У новій роботі дослідники навчили нейромережу слідувати текстовим навігаційним інструкціям. Програмісти доповнили раніше створене ними навчальне середовище, додавши в нього навігаційні вказівки з Google Maps для випадково вибраних початкових і кінцевих пунктів. Дослідники помістили в StreetNav - так було назване нове середовище - агента і дали йому набір команд (наприклад, «поверни направо на перехресті») і знімків, які мали допомогти йому дістатися до потрібного місця. Якщо комп’ютер досягав мети або робив правильні кроки, він отримував нагороду - такий метод тренування називається навчанням з підкріпленням.
Під час навчання та контрольного тестування агент подорожував різними частинах Манхеттена. Перевірка показала, що алгоритм непогано справляється з навігацією за інструкціями: його найкращий результат становив 72,7 відсотка. Однак коли програмісти перевірили здібності штучного інтелекту, відправивши його в подорож незнайомим середовищем, він зміг досягти успіху лише у 46,6% випадків.
Самі дослідники зазначають, що створена ними програма вимагає серйозного доопрацювання. Тим не менш, створена DeepMind модель може лягти в основу інших, більш просунутих навігаційних алгоритмів і дозволити зробити безпілотні автомобілі більш адаптованими до реального життя.
У минулому лабораторія Google DeepMind розробила новий підхід до навчання алгоритмів штучного інтелекту, який дозволяє зробити процес в десять разів ефективнішим. Крім того, DeepMind також випустила набір нових ігрових рівнів для віртуального середовища DeepMind Lab.



















