Швейцарські інженери розробили алгоритм управління нестабільним роботом з маніпулятором, який здатний одночасно враховувати поточне завдання маніпулятора і балансувати корпус. Розробники продемонстрували роботу алгоритму на прикладі робота, що пересувається на кулі, навчивши його переміщатися в задану точку, навіть при наявності зовнішніх збурень, а також відкривати двері.
Багато роботів, наприклад, практично всі колісні, стабільні і не падають при зупинці. Деякі ж мають нестабільну конструкцію і їм необхідно постійно підтримувати баланс. Приміром, багато довгоногих роботів є нестабільними. Саме по собі завдання балансування в таких роботах досить давно вивчене і вирішене, однак не завжди алгоритми балансування дозволяють одночасно стабілізувати становище робота і виконувати іншу задачу з допомогою його рук. А ті алгоритми, які здатні виконувати обидві задачі, роблять це у два окремих етапи, інформує Ukr.Media.
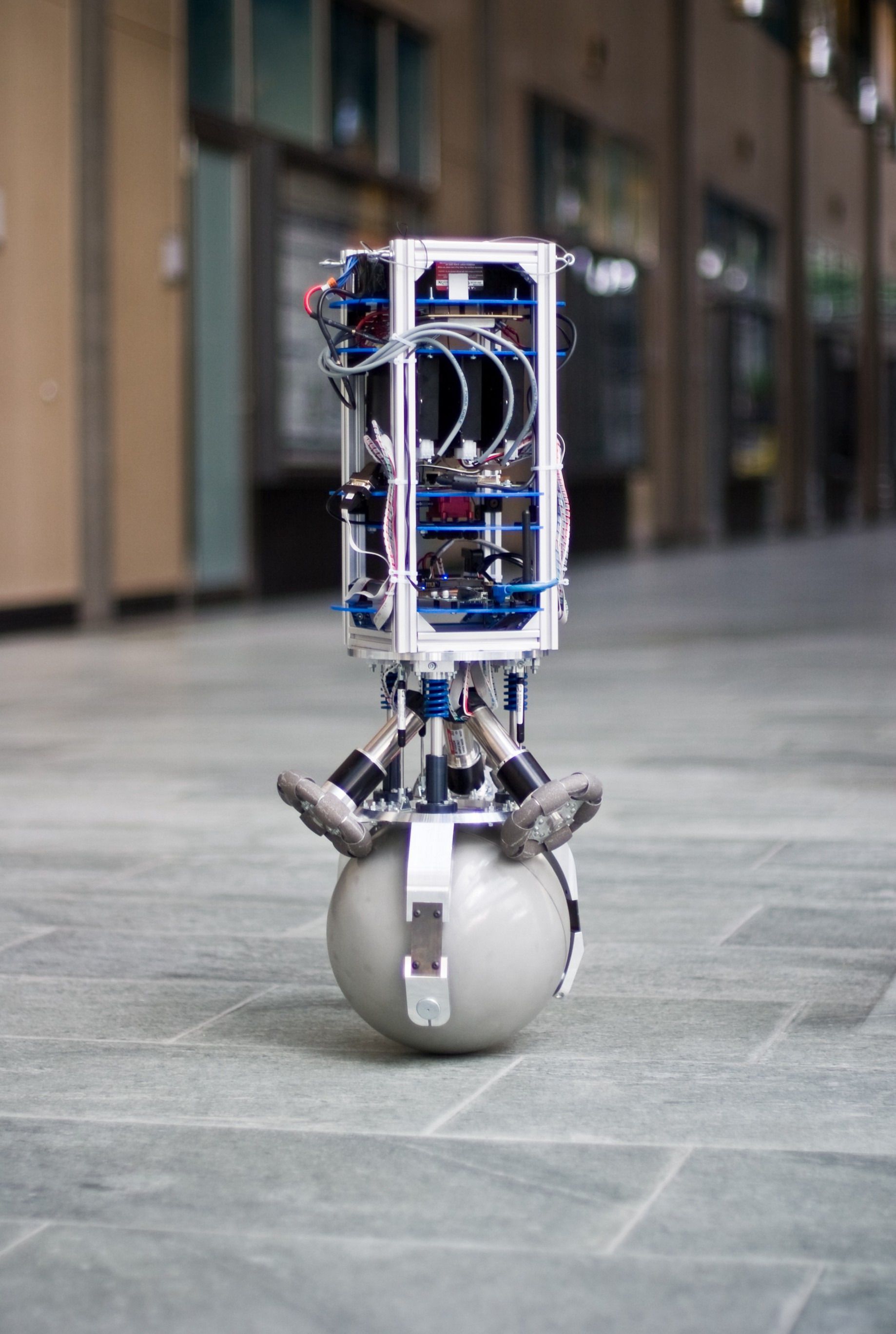
Інженери зі Швейцарської вищої технічної школи Цюріха під керівництвом Марка Хюттера (Marco Hutter) розробили алгоритм управління нестабільним роботом, який планує рухи для балансування всього робота і виконання завдання маніпулятора в один етап, що підвищує стабільність і розширює можливості робота. Інженери використовували у своїй роботі, робота Rezero, але вони відзначають, що той же принцип управління можна використовувати і в інших динамічно балансуючих роботів, зокрема людиноподібних. Rezero стоїть на кулі, яка приводиться в рух трьома колесами над ним. У верхній частині встановлено маніпулятор з трьома ступенями свободи.
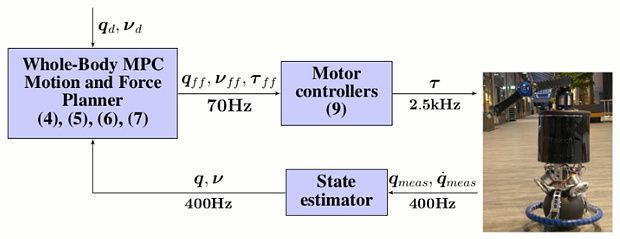
Розробники написали єдиний алгоритм, який враховує стан усіх базових частин робота (трьох коліс, керуючих кулею, і трьох моторів, що з'єднують сегменти маніпулятора), а також відстежує кутову і лінійну швидкість робота. Алгоритм отримує двоскладові завдання, наприклад, необхідні положення кінця маніпулятора і підстави кулі, і в один етап розраховує команди для шести електромоторів в руховій системі і маніпуляторі. При цьому він постійно коригує розрахунки, порівнюючи їх з показаннями датчиків, що дозволяє справлятися із зовнішніми збуреннями, наприклад, від людини.
Нещодавно американські інженери представили автономну версію одноногого робота Salto. Його стабілізація — ще більш складна задача, тому що він не може стояти на місці і змушений постійно підстрибувати, коригуючи свою траєкторію в короткий момент, коли його нога торкається підлоги. А британські інженери створили нестабільного робота з чотирма колесами Ілона, що дозволяє йому рухатися в будь-яку сторону, незважаючи на те, що колеса статично закріплені і не повертаються.