Японські інженери розробили жилет з лазерами і камерою, який можна використовувати для дистанційного керування собакою. Завдяки лазерним плямам на підлозі оператор змушує собаку рухатися в потрібному напрямку, а зображення з камери можна використовувати для дослідження навколишнього простору, розповідають розробники в статті, представленої на конференції CBS 2018, інформує UkrMedia.
Як правило, розробки, що дозволяють управляти тваринами, являють собою інвазивні нейроінтерфейси. Вони підключаються до нервової системи організму і завдяки електричним імпульсам викликають або безпосередньо скорочення певних м’язів, які діють на рецептори або інші органи, після чого тварина сама вирішує почати рух. До прикладу, в минулому році дослідники створили сінгапурську переносну плату для жука, яка стимулює його вусики і створює відчуття зіткнення з перешкодою, в результаті чого жук рухається в протилежну сторону.
Незважаючи на те, що вчені вважають такий підхід більш перспективним, поки такі технології знаходяться на початковому етапі розвитку і далекі від реального застосування. Частина інженерів пропонує поки використовувати більш простий спосіб - створювати для тварин залучаючі візуальні стимули. У минулому році американський інженер показав цікаву реалізацію такого методу і створив механізм, який керує розташуванням сосиски над собакою і змушує її рухатися в потрібну сторону.
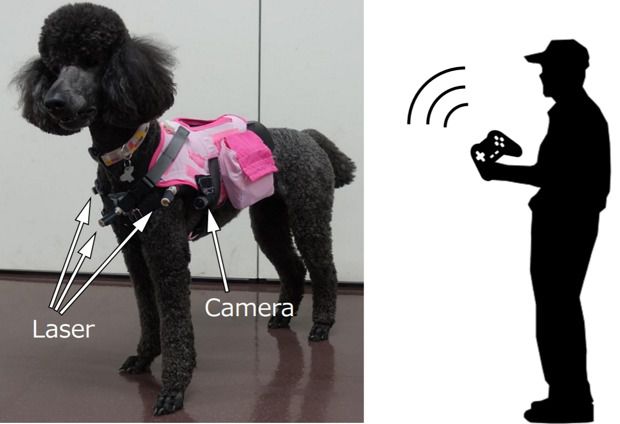
Інженери під керівництвом Сатоші Тадокоро (Satoshi Tadokoro) з Університету Тохоку реалізували той же принцип управління за допомогою зовнішніх подразників іншим чином - за допомогою лазерної плями на підлозі перед собакою. Пристрій являє собою жилет, на якому закріплені три або чотири лазерних проектора, залежно від прототипу, а також камера. Лазери спрямовані статично таким чином, щоб пляма від них знаходилося перед собакою або у стороні від неї. Пристрій пов’язаний з геймпадом оператора, який може керувати рухом тварини, перемикаючи працюючим проектор.
Розробники провели випробовування на трьох пуделях, в результаті яких вони змогли визначити оптимальний кут розміщення лазерів, їх яскравість і колір. Крім того, інженери показали на практиці, що оператор може посилати собаку до потрібного місця і отримувати звідти відео в реальному часі.
У минулому році корейські інженери створили інший незвичайний неінвазивний пристрій для керування рухом черепахи з допомогою зовнішніх стимулів. Він складається з циліндра з вирізом, який можна повертати в ту або іншу сторону, завдяки чому повертається і черепаха. Особливість розробки полягає ще і в тому, що вона управляється за допомогою електроенцефалографічних сигналів, прочитуваних гарнітурою нейрокомп’ютерного інтерфейсу і передаються через Wi-Fi на пристрій.



















