
Китайські інженери створили алгоритм, що дозволяє дрону і наземному роботу спільно створювати карту навколишнього середовища і уникати перешкод у ній. Експерименти показали, що такий метод дозволяє досліджувати середовище швидше, ніж це роблять ті ж апарати поодинці, розповідають автори статті, яка буде представлена на конференції ISER 2018, інформує UkrMedia.
Як правило, при розробці роботів інженери вибирають їх конструкцію виходячи із завдання, яке це пристрій виконуватиме. Наприклад, наземні роботи можуть перевозити досить масивний вантаж або безліч датчиків і інструментів для взаємодії з середовищем. Безпілотні літальні апарати, такі як мультикоптери, теж мають свої переваги, у тому числі, вони здатні переміщатися швидше і досліджувати більшу територію.
Інженери під керівництвом Шаоцзе Шеня (Shaojie Shen) з університету науки і технології вирішили об’єднати апарати різних типів в єдину систему, що працює більш ефективно, ніж ті ж апарати поодинці. На відміну від інших інженерів, Шень і колеги вирішили використовувати дрон в якості повноцінного, а не резервного джерела даних.
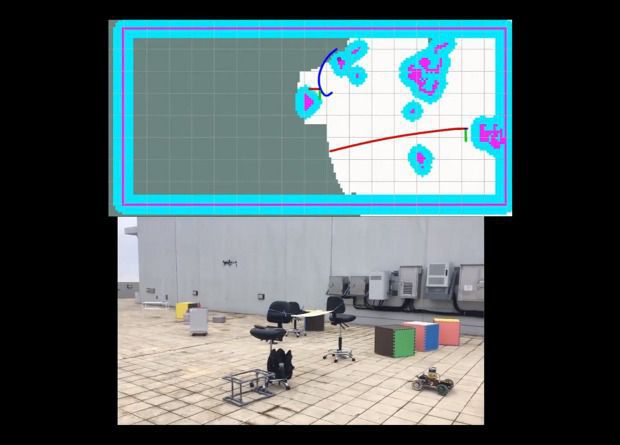
Розробники створили алгоритм, який постійно будує карту місцевості і наносить на неї об’єкти. При цьому між дослідженою і недослідженою областями утворюється кордон. Планувальник шляхів для роботів влаштований таким чином, що він постійно оновлює траєкторію і посилає робота до найбільш довгої ділянки кордону, таким чином заохочуючи дослідження найбільших невивчених областей.
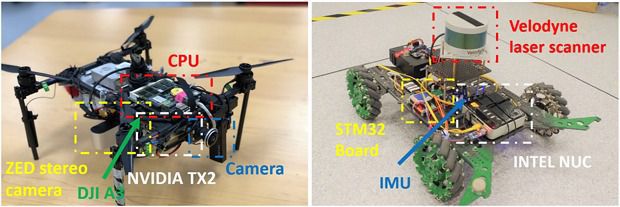
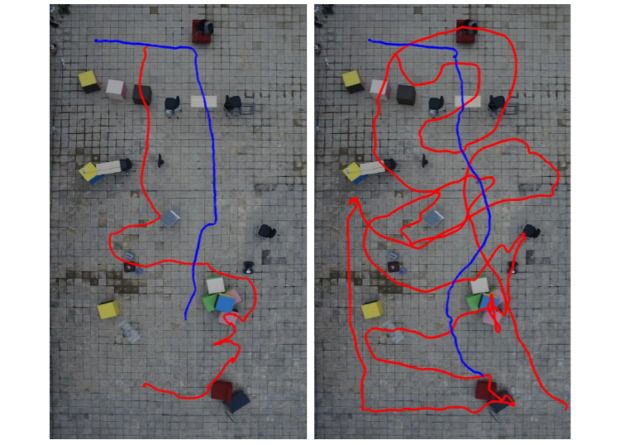
Інженери самостійно створили чотириколісного робота з лідаром і квадрокоптер з спрямованою вниз стереокамерою для створення карти місцевості. Під час пересування робот і дрон в реальному часі створюють єдину карту місцевості з нанесеними на неї перешкодами. Завдяки цьому кожен з них може не витрачати час на дослідження області, якщо дані про неї вже зібрав інший апарат.
Інженери провели два типи експериментів - в реальній кімнаті розміром 17 на 8 метрів, а також віртуальному просторі розміром 20 на 20 метрів. Під час експериментів апарати працювали разом чи поодинці. Результати експериментів показали, що у всіх типах середовищ (віртуальному та реальному) кооперація апаратів двох типів дозволяє їм скласти повну карту приміщення швидше, ніж при самостійній роботі.
Нещодавно група інженерів з США та Швейцарії створила пару невеликих дронів, які завдяки спільній роботі навчилися виконувати досить складні завдання. В одному з продемонстрованих експериментів дрони змогли самостійно відкрити великі двері з натиснутою ручкою.



















