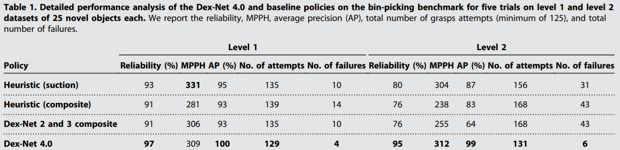
Американські інженери розробили нову версію алгоритму Dex-Net, що дозволяє роботам з маніпуляторами вистачати предмети з високою точністю. З новим алгоритмом робот може вибирати підходящу руку, використовувати захвати різних типів і підбирати оптимальний інструмент під конкретний об’єкт. Експерименти показали, що при розборі кошика з 25 незнайомими предметами точність захоплення становить 95%, розповідають автори статті, опублікованій в Science Robotics, інформує Ukr.Media.
Захоплення предметів - це одне з найбільш розвиваючих напрямків сучасної робототехніки. Багато в чому це пов’язано з тим, що ця задача дуже часто зустрічається в промисловості або логістиці. Приміром, через склади великих онлайн-магазинів постійно проходить безліч товарів різної форми, розміру і маси. Один з найбільших в світі онлайн-магазинів Amazon до 2018 року проводив змагання серед розробників роботів, чиї напрацювання можуть стати в нагоді компанії для сортування замовлень без участі людей.
Група інженерів з Каліфорнійського університету в Берклі під керівництвом Кена Голдберга (Ken Goldberg) займається цією проблемою вже кілька років і в 2017 році вони представили першу версію нейромережевого алгоритму і датасета Dex-Net. В якості архітектури Dex-Net використовує згорткову нейромережу, а в якості джерела даних - камеру глибини. Автори досить швидко створювали нові версії алгоритму, і в 2018 році вони представили Dex-Net 4.0, проте повноцінна стаття з його описом опублікована тільки зараз.
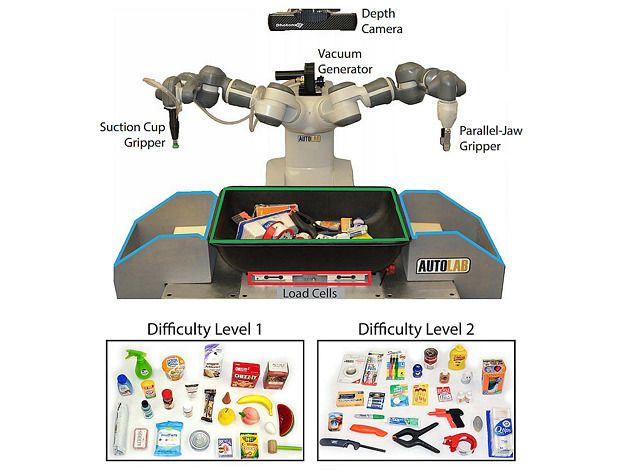
Головна відмінність від попередніх версій алгоритму - можливість використовувати одночасно захоплення різних типів. У своїй роботі автори зосередилися на захопленнях двох типів - вакуумної присоски і класичному захопленні двома паралельними поверхнями, які зжимаються. В якості апаратної платформи розробники вибрали промислового та дослідницького робота ABB YuMi.
Цього разу інженери вирішили використовувати для двох рук з різними захопленнями дві окремі нейромережі. Кожна з них отримує дані з камери глибини, розпізнає об’єкти перед собою і розраховує для кожного об’єкта таку точку захоплення, яка з найбільшою ймовірністю приведе до якісного утримання. Під таким захопленням автори розуміють ситуацію, за якої робот може не тільки підняти предмет, але і не кидати його за наявності невеликих зовнішніх впливів. Перед початком роботи робот вибирає захоплення, для якого була розрахована найбільша ймовірність, а потім бере предмет і перекладає його в інший кошик.
Розробники навчили робота на його віртуальному аналогу, створивши датасет, який складається з п’яти мільйонів захоплень 1664 різних предметів. Крім того, частина навчених моделей також отримували дані про реальні захоплення, отримані під час попередніх експериментів. Після навчання інженери провели випробовування алгоритму на реальному роботі і незнайомих йому об’єктах. При захопленні складних повсякденних об’єктів, таких як інструменти і упаковки складної форми, надійність захоплення склала 95%, а швидкість - 312 захоплень на годину.