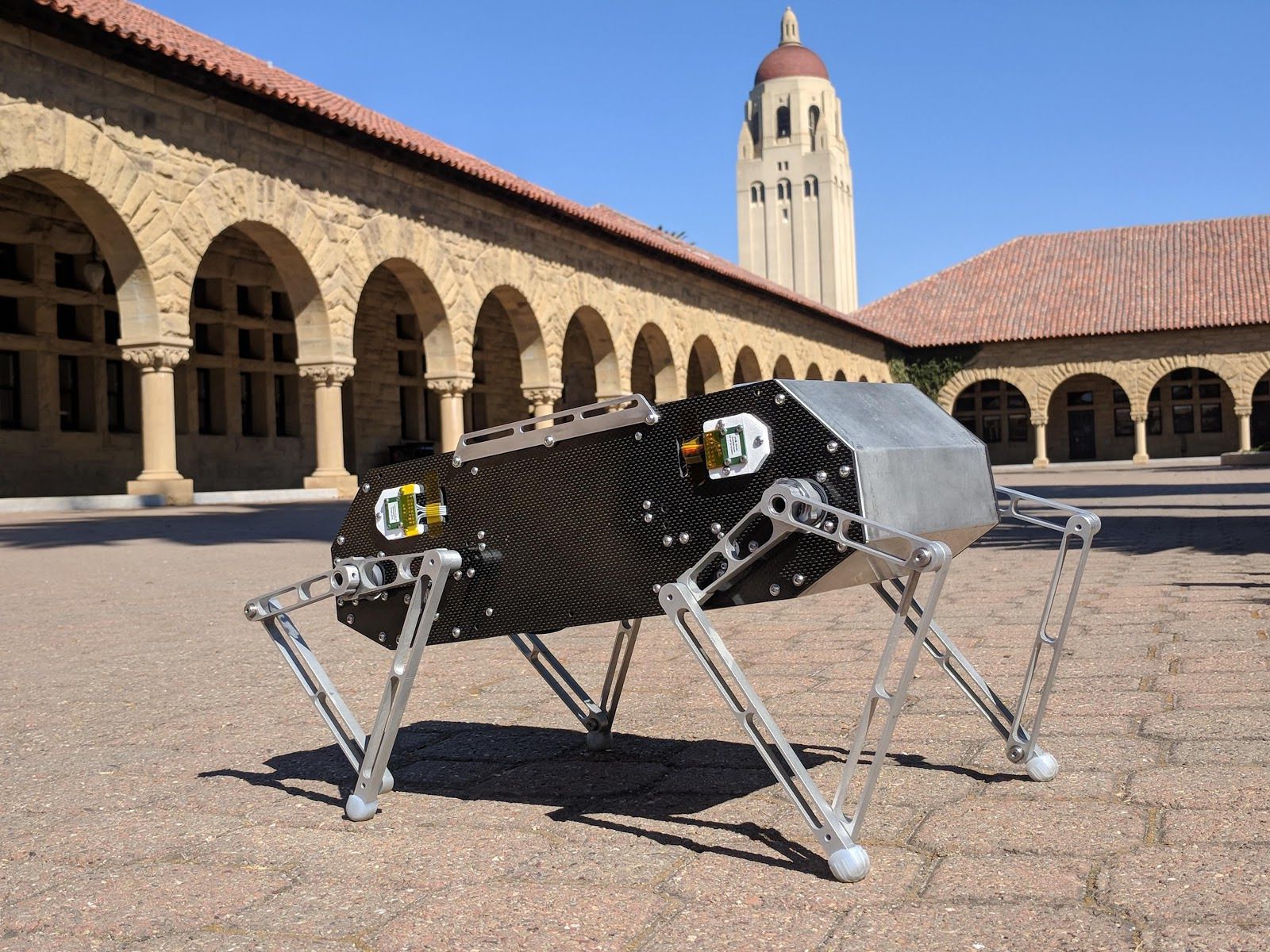
Американські інженери представили чотириногого робота Doggo, якого можуть легко зібрати всі бажаючі, використовуючи комерційно доступні компоненти, відкрите програмне забезпечення і документацію, опубліковану авторами на GitHub. У нинішній версії програмне забезпечення дозволяє роботу виконувати досить складні маневри, зокрема і зворотне сальто. Крім того, робот здатний здійснювати стрибки з більшою висотою, ніж інші ходячі роботи, інформує Ukr.Media.
Розробники часто воліють конструкції з чотирма ногами, тому що вони дозволяють долати перешкоди, непрохідні для колісних пристроїв. Інженери створюють чотирилапих роботів досить давно, і крім відомих роботів від Boston Dynamics існує безліч інших розробок. Однак цих роботів об’єднує не тільки схожа конструкція, але і те, що вони недоступні звичайним людям, хоча Boston Dynamics і Ghost Robotics збираються почати серійне виробництво своїх розробок.
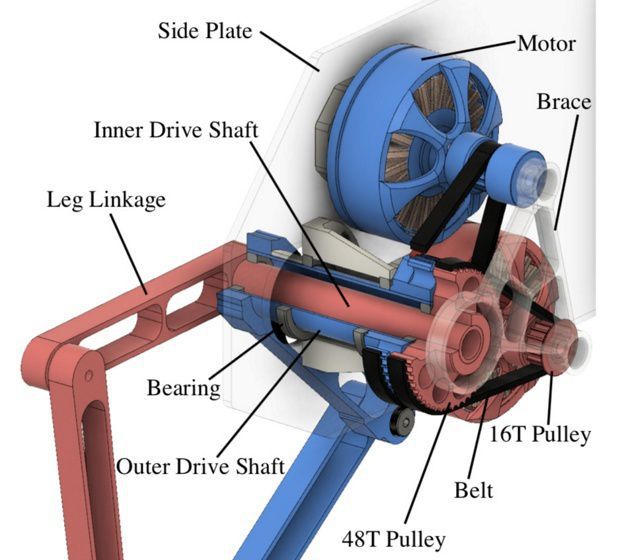
Інженери з Стенфордського університету під керівництвом Патріка Слейда (Patrick Slade) представили робота Doggo, призначеного для самостійної збірки з комерційно доступних компонентів. За конструкцією Doggo схожий на робота Minitaur, розробленого в Ghost Robotics. Кожна нога робота складається з чотирьох основних сегментів, пов’язаних між собою. На підставі ноги встановлено два двигуни, які через знижувальну ремінну передачу пов’язані з тим чи іншим валом на поєднанні двох верхніх елементів ноги.
Така конструкція дозволяє управляти рухом ноги в будь-якому напрямку (в межах однієї площини). Ще одна перевага конструкції полягає в тому, що вона дозволяє використовувати двигуни в якості датчиків навантаження. Це дозволяє роботу обходитися без амортизуючих елементів і пом’якшувати удари при приземленні з допомогою їх активного гасіння двигунами.
Експерименти з роботом показали, що він здатний стрибати з нерухомого положення на висоту 1,07 метра, причому він витрачає на це менше половини секунди. За цими параметрами він перевершує всіх інших відомих ходячих роботів, включаючи Minitaur, зазначають автори. Попри схожість конструкції між Minitaur і Doggo, результати відрізняються через те, що в новому роботі двигуни і передача забезпечують більший крутний момент.
Розмір робота становить 42 сантиметри в довжину і 20 сантиметрів завширшки, а маса складає менш як п’ять кілограмів. При розробці інженери відштовхувалися від доступності компонентів і відносної простоти складання робота. Вони опублікували на GitHub всю необхідну інформацію, в тому числі список деталей з посиланнями на популярні магазини. Автори оцінюють загальну вартість створення робота приблизно в три тисячі доларів. Після складання користувачеві необхідно завантажити в робота прошивки контролера двигунів і центрального мікроконтролера. Потім роботом можна керувати дистанційно, даючи йому команди на ходьбу, стрибки та інші дії.
Створенням проектів відкритих роботів займаються і інші інженери, зокрема і з великих організацій. До прикладу, в минулому році NASA опублікувало документацію та програмне забезпечення, необхідне для складання спрощеної і зменшеної версії марсохода «Кьюріосіті».



















