
Роботизована рука автоматичної марсіанської станції InSight зможе допомогти буровій установці HP3 відновити роботу, трохи піднявши її, тим самим компенсувати віддачу при ударах. До такого висновку прийшли інженери місії, назвали недостатнє зчеплення між буром і навколишнім ґрунтом основною версією припинення робіт з буріння, повідомляється на сайті Німецького центру авіації та космонавтики, інформує Ukr.Media.
Старт автоматичної дослідницької місії InSight відбувся в травні 2018 року. Основне завдання місії — дослідження внутрішньої будови Марса і геологічних процесів, що йдуть в його надрах. Станція здійснила посадку в листопаді 2018 року в районі нагір’я Елізіум, а в середині грудня 2018 року і в лютому 2019 року встановила на поверхні Марса два основних наукових інструменти місії: бур HP3, призначений для вимірювання теплових потоків в марсіанському ґрунті, і сейсмограф SEIS, який нещодавно зареєстрував своє перше «марсотрясіння». На початку лютого 2019 року розпочала повноцінну роботу система датчиків APSS, що збирає дані про погодні умови.
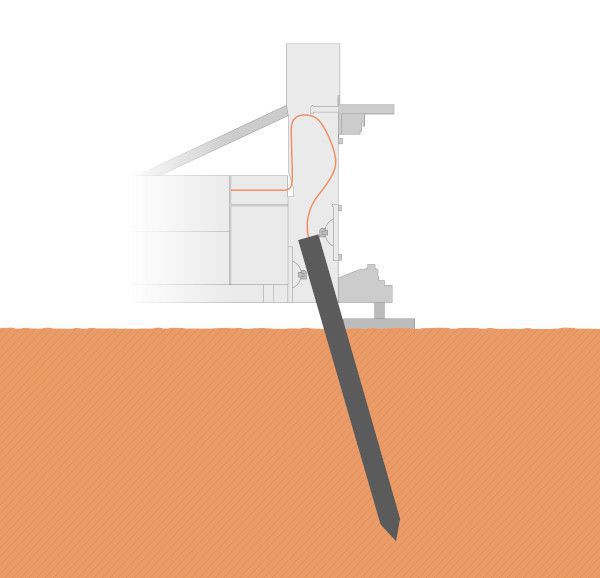
На початку березня цього року інструмент HP3 призупинив бурові роботи, заглибившись в ґрунт на 30 сантиметрів. Передбачається, що бур зіткнувся з каменем, що підтверджується даними, отриманими сейсмографом у ході серії діагностичних ударів. Задня частина установки зачепилася за опорну конструкцію і трохи накренилася, через що бур опинився в пастці. Друга версія події полягає в тому, що існує недостатнє зчеплення між буром і навколишнім ґрунтом: таке можливо, якщо свердловина заповнена уламковим матеріалом або реголітом, і віддача при ударах не врівноважується. Ця версія підтверджується технічними даними, отриманими HP3 і зараз прийнята як основна.
Зараз інженери місії готуються провести операцію з підняття опорної конструкції бурової установки за допомогою механізму захоплення, встановленого на 2,4-метровій роботизованій руці IDA (Instrument Deployment Arm). Це повинно допомогти або компенсувати віддачу при бурінні, або повністю вивільнити бур з пастки. Очікується, що процес підйому буде проходити в кілька етапів, починаючи з кінця червня. Спочатку рука підчепить опорну конструкцію, потім протягом тижня вона буде акуратно піднімати установку в три етапи, постійно контролюючи процес за допомогою камер. Якщо щось піде не так, рука зможе витягнути бур з ґрунту, але він стане непридатним для роботи, оскільки маніпулятор нездатний вставити його назад у свердловину, а бурова установка спроектована так, що не передбачає висмикування грубою силою і буде пошкоджена при такому способі витягу.



















